全國服務熱線
0769-85333197全國服務熱線
0769-853331972020-12-21 16:55:44 0
RV減速器作為工業機器人的關節,是機器人的重要組成部分,也是機器人的基本運動部件。
RV減速器主要由擺線齒輪、偏心軸、銷齒殼等組成,結構緊湊,傳動比高,振動小,噪音低。
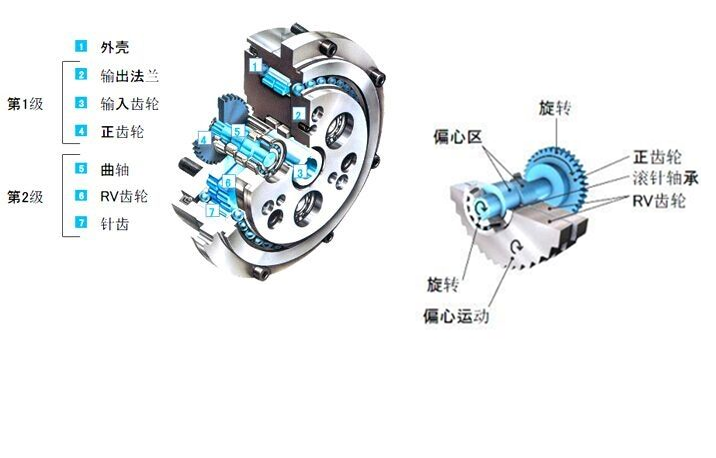
以RV-E減速器為例,介紹了其工作原理。

RV-E減速器主要包括第一和第二部分
第一部分為正齒輪減速器輸入軸,輸入軸由正齒輪傳動。
第二部分是差動齒輪減速器,正齒輪與曲軸相連,可在曲軸的偏心部分插入,齒輪齒條由曲軸安裝。另外,齒條殼體內側還有一個以上的銷齒。
如果殼體固定轉動正齒輪,齒輪齒條也偏心,如果曲軸在一周內轉動,齒輪齒條將輸出到減速器的第二部分。當軸固定時,殼側成為輸出端
RV減速器的技術難點在于需要保證傳動扭矩大,對過載有較大的影響,保證了預期的使用壽命,從而確定了定位結構設計,使零件加工精度要求高,加工難度大。

機器人的第一關節與第四關節均采用RV減速器,重量輕的機器人可以使用第五關節和第六關節的諧波減速器。重載機器人的所有關節均需要使用RV減速器,每個機器人均采用4.5 RV減速器。
工業機器人的電源通常是交流伺服電機,因為脈沖信號驅動,伺服電機可以實現調速,為什么還需要減速器?定位精度和精度重復定位
因此,為了提高和保證工業機器人的精度,對工業機器人中的RV減速器或諧波減速器的其它功能進行了分析,在負載較大的情況下,傳遞更多的扭矩,提高此外,伺服電機在低頻運行時易發生熱、低頻振動,從而保證了伺服電機的精度和可靠性。
精密減速器的存在使得伺服電機以適當的速度運行,降低了工業機器人各部分的轉速,需要增加機械本體的剛度,與普通減速器相比,其機器人關節減速器具有體積小、功率大、重量輕,與諧波減速器相比,RV減速器具有較高的剛度,因此,在關節機器人中,RV減速器通常置于機架、大臂、肩等重載中,而一種用于直角坐標機器人的小臂、手腕或手的行星減速器。
同時,RV減速器能夠顯著降低運動精度,目前許多國家采用了高精度的RV減速器,其疲勞強度、剛度、壽命比普通諧波傳動長。







技術微信